人机互助的过程中,机械臂对人本身有那些影响?
人机互助机械臂应保证其能够在非结构化且部分未知的环境中运行,与人类用户共享工作空间,可处理不可避免或故意碰撞的情况。人机互助机械臂最本质要求为友好性与安全性,其直接推动碰撞检测技术的需求和发展,但现有碰撞检测技术中存在非线性扰动因素导致检测不稳定甚至出现检测错误的问题,直接影响人机互助作业性能。
传统工业机械臂通常工作在与操作者隔离的结构化环境中,设计时主要考虑机械臂作业的速度与精度,而与操作者合作互助的能力未被开发,通用性较差,具有诸多作业环境的限制。为了使机械臂更智能的应用于生产生活,人机互助机械臂因具备安全性、灵巧性及友好人机交互性等诸多优势备受重视,其集成了先进的交互功能。

可在非结构化作业环境中与操作人员进行交互,与人类协同构建共存环境中人机共融作业模式。人机互助机械臂作业在以人为本的环境中,任何公共场所下人机互助作业都必须要求机械臂对人类是友好的且工作是可靠的。
目前人机互助机械臂的应用范围逐渐延伸,涉及从军用民用工业环境到家庭服务、医疗救援等各行各业,现代化、高度自动化的工厂变得越来越复杂,典型应用包括面向军用领域高价值卫星人机互助装配与民用领域重复作业人机互助生产。

主要解决军用领域高价值卫星零部件装配种类多、工作空间狭小、劳动强度大问题与民用领域机器人关节生产工艺流程复杂、精度要求高等问题。那么人机互助的过程中,机械臂对人本身有那些影响?
一、人机互助机械臂发展
人机互助已被认为是许多应用领域中未来机器人的关键要素,例如制造,运输,服务和娱乐,这些应用带来了巨大的社会和经济影响。可以预见,未来的机械臂将像人类的双臂一样发挥作用,它们是独立自主的实体,并具有丰富的意识和判断能力,可以自行决策,与物理世界互动的智能执行器。
它们将作为人类的多功能助手,成为人类生产生活中不可或缺的一部分。双臂协作机器人,其设计平衡了安全与柔性生产的需求,能够在生产中协助工作人员完成大量的重复枯燥的劳动,机械臂从事生产车间的流水线作业,可将人类转移到更高级的技能岗位上;机械臂协助工作人员组装精密复杂零部件,可使人类专注关键技术研究。

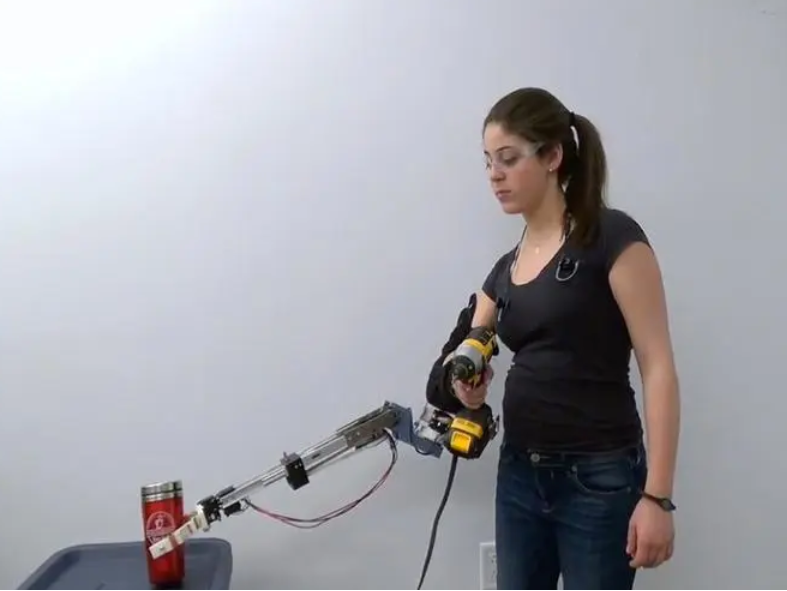
机械臂可与工作人员占据相同的工作空间,当机械臂感受到意外的碰撞,将立即暂停运动,此外,其镁质骨架上覆盖着柔软的圆弧状填充物,可以极大地减轻撞击伤害,确保安全时也可轻易使其继续完成工作。受人类使用工具及与环境交互多功能性的启发,开发了可通过调整
前馈力和阻抗来估计与未知环境的相互作用力的控制器,通过自动调整其运动轨迹以适应刚性环境并维持所需的相互作用力,从而补偿了相互作用力和运动轨迹的不稳定性,在机械臂末端上安装了刀具或钻头,切割、钻孔及触觉探测等具有代表性的交互任务。

以测试该控制器在未知工作环境下交互产生的阻抗与前馈力适应性,证明其开发控制器的性能。数据和视觉数据结合,开发了一种力控制和视觉控制的混合控制器,该控制器用于双臂机器人与人类搭档一同处理桌布。
二、辅助机械臂碰撞分析
不同于在结构化和确定性环境中工作的传统机械臂,人机互助机械臂需要在高度非结构化和高随机性环境中运行,如何确保人机互助机械臂在动态不确定环境中高效安全地运行成为研究重点。碰撞检测技术是解决人机交互的安全问题重要途径。

国际标准化组织提出了有关人机互助机械臂安全的相关技术标准,其中包括安全规范,风险评估等,人机互助机械臂应用中必须符合安全性ISO15066的标准,要求机械臂在人类存在于危险工作范围内时减速或停止运动,以最大程度地减少人机交互中碰撞引起的潜在风险。
当机械臂在非结构化环境中运行时,工作空间中的不确定性会导致人机意外碰撞。具有安全性和灵活性的人机互助机械臂可以检测每个关节的碰撞扭矩并对碰撞做出反应。在不可预测的环境中优化人机碰撞检测是人机互助机械臂面临的最关键和紧迫的问题。

传统的人机互助机械臂的碰撞检测设计常采用安装外部传感器的方案,能够提供精确的关节力矩信息的关节力矩传感器与能够提供末端执行器所受的空间六维力分量的六维力传感器,通过外部传感器能够准确的获得机械臂的受力情况,很好的保证了人机互助作业的安全,使得碰撞检测能够应用在更复杂的场合。
关节力矩传感器安装在机械臂关节上,通常根据关节中运动部件的变形计算扭矩,KUKALWR机械臂使用关节力矩传感器,优点是可以检测施加在每个关节上的力,但关节设计复杂化导致成本增加。六维力传感器通常安装在机械臂末端,适用于需要高精度作业的力控制。

多种带有关节力矩传感器的机械臂为研究对象,实现了较精确的碰撞检测,验证了基于广义动量构造外力矩观测器进行碰撞检测。在此研究基础上,他们还基于采集的关节力矩信息,研究了弹性能量存储和释放对于篮球运球的主要作用,进一步分析能量特性改进控制器,达到稳定平移和旋转的动态循环。
为可靠地在线估算接触点处的接触力,建立了基于动量的残差生成器以构建虚拟力传感器。通过深度图像信息定位接触点位置,关节力矩信息可精确估计机械臂与人的碰撞位置与碰撞力的大小,实验验证所提出方案能够实现检测机械臂任何位置可能发生的接触碰撞。

增加关节力矩传感器的方案具有增加机械臂关节设计复杂性以及限制机械臂性能等弊端,同时增加了机器人开发制造的成本;而六维力传感器的价格昂贵,且因其只能检测末端碰撞很少被用于实时检测碰撞的研究。
相比较之下,基于无传感器的碰撞检测方案由于未改变机器人的结构设计,对机械臂的性能基本无影响,被广泛应用于不需要高精度的服务型应用开发。现有的研究大都根据计算模型与关节电流等信息构造虚拟力传感器,进而对机械臂碰撞力矩进行估计。

虚拟力传感器的研究主要分为位置虚拟传感器与电流虚拟传感器,前者可以比较位置和速度的变化估计电机产生的外部力矩,后者通过测量电流变化计算外部力矩。虚拟力传感器模型作为接触力观测器,根据电机电流和系统模型的计算误差可估算关节外力矩,进而估算机械臂末端接触力矩。
在伺服控制器中引入了扭矩饱和限制器,基于估计的外力,能够在不涉及过多参数下实时测量并更改关节扭矩输出,进而调整机械臂的系统刚度,实现机械臂的安全碰撞检测和低精度力控制,提高了机械臂在人机交互中使用的安全性。

区分预期接触与非预期碰撞的区分检测算法,基于广义动量建立了虚拟传感器,只需采样关节电机驱动电流和位置信息即可,在该虚拟传感器中设计了两个具有低通和带通滤波特性的观测器,可实时检测到不同的力信号。
由于接触力与碰撞力频率分布和信号轻重不同,可根据关节力矩传感器的数据观测外力变化的速度,检测并区分人机间的互动是接触还是碰撞,是预期的还是非预期的,虚拟传感器可用于人机交互中的碰撞检测和区分,能够确保人员安全并提高交互性能。

基于深度学习方法的实时碰撞检测方法,设计了一个深度神经网络模型学习机器人碰撞信号并识别碰撞发生,其对模型不确定性和传感器噪声非常不敏感,它能够提取并接受来自机械臂关节的高维信号作为输入,以实现对碰撞的高敏感性和对误报警的低敏感性。
基于6自由度工业协作机器人进行了各种实验,实现了比传统碰撞检测方法更高的碰撞检测精度,结果验证了基于神经网络的碰撞检测方案不仅对碰撞具有很高的敏感性,而且对由噪声信号和模型不确定性引起的假阳性检测具有很高的鲁棒性。

三、互助机械臂性能
人机互助机械臂关节力矩信息的精确度决定机械臂碰撞检测的稳定性,在无外力矩传感器的方案中,由电流值所求解的关节力矩为机械臂关节所受到的总力矩,其中包含了一系列非线性扰动因素的影响,从中求取机械臂驱动力矩需对扰动因素进行分析。
机械臂关节在高负载持久运动情况下会导致关节温度上升,使机械臂的关节性能发生改变。改进摩擦模型作为控制系统的前馈补偿,并基于实验室自主研发的六自由度工业机械臂设计了实验,对比了常规模型与改进模型的补偿效果,结果证明了温度影响是对机械臂关节力矩干扰的重要因素。

机械臂关节非线性扰动因素中,除上述温度与间隙的影响外,摩擦也是其重要组成部分。基于摩擦现象研究,在动力学辨识过程中附加库伦与粘滞摩擦模型是当前研究摩擦力的主要方法,广义动量的虚拟传感器来估计电机侧与连杆侧的摩擦力矩,并在摩擦补偿后可改善控制器的轨迹跟踪性能。
基于神经网络改进了非线性干扰观测器,通过关节控制器补偿了估计的摩擦转矩,用于机器人碰撞检测以获得更好的碰撞检测性能,进行了六自由度机械臂仿真和两个单关节机械臂实验,验证了所提出研究方案对估计关节摩擦力和提高关节控制器性能的有效性。

结语:
为了使人机互助机械臂能够与人类共享工作空间并进行交互,需要快速可靠地检测机械臂结构上可能发生的碰撞,制定控制策略以确保碰撞后的安全反应。在复杂人机交互特别是多点接触交互作业过程中,存在诸多不确定因素,碰撞检测是未来人机友好安全互助机械臂拟要解决的关键问题。
机械臂在任何给定的狭小工作空间中发生不可避免碰撞时碰撞检测的及时性与反应策略的有效性,非预测环境下人与机械臂之间的碰撞检测技术的突破,以及碰撞检测后机械臂作业反应的变换,对实现人机互助机械臂的安全性、友好性和协作性尤为重要。
大家都在看
-
三件小事最耗气血,别再做了! 《黄帝内经》中说:“人之所有者,血与气耳。”意思是说,气血是生命的根本,如果把人体比作一台运转的机器,气血就是最根本的动力。日常生活中,哪些事情最耗气血,调补气血有哪些好方法?一起来看!(转自:首都中 ... 机械之最04-09
-

古董钟表里的机械之美,时光流转中的经典工艺。 小夜莺发现森林的钟表集体变慢,月亮像打瞌睡的老人迟迟不下班。树洞深处时间蜜蜂正用破损的蜂巢修补时针,每滴花蜜能凝固三分钟。夜莺衔来沾露的玫瑰,啄木鸟敲打水晶树校准节奏。当最后一道裂缝被晨光填平,迟到的 ... 机械之最04-09
-

"立木为信"的商鞅,为何成了帝国最锋利的刀? 公元前359年的咸阳南门,一根三丈高的木杆旁围满了看热闹的百姓。卫国人商鞅当众宣布:"谁能把这根木头搬到北门,赏十金。"人群窃窃私语却无人上前,直到赏金涨到五十金,终于有个壮汉抱着试试看的心态扛走 ... 机械之最04-09
-

机械革命最划算游戏本来了?配置低但价格给力,国补后3999元 如果说国补之后哪款笔记本能让很多人兴奋的话,机械革命极光X绝对是其中一个。如果再细分到游戏本这块,那就几乎只有这个。过气但是强大的CPU,加上主流的RTX4060或者RTX4070独显,配上合适的价格,说一机难求也不过 ... 机械之最04-09
-

宇树机器狗最具有成长潜力的10家企业!一、长盛轴承二、绿的谐波 在这个科技日新月异的时代,机器人早已不再是科幻电影中的专属。尤其是机器狗的出现,更是让人们对未来充满了无限遐想。而在这股浪潮中,宇树科技凭借其卓越的产品,迅速崭露头角。但你可知道,在这只机器狗的背后, ... 机械之最04-07
-

机械之舞:当国产机器人跳出《功夫》的江湖气韵 在科技与文化的交汇处,一场别开生面的表演正在上演:国产机器人整齐划一地跳起《功夫》中的经典斧头舞,金属关节精准复刻每一个武打动作,电子眼中仿佛闪烁着周星驰电影特有的戏谑光芒。这一幕既荒诞又和谐,既未来 ... 机械之最04-06
-

至今无法被超越的经典运输机安225,机械之美超级运输机! 在人类航空的浩瀚星空中,安-225“梦幻”运输机犹如一颗耀眼的星辰,散发着令人无法抗拒的机械魅力。每当提及它,我的内心总会涌现出无尽的感慨。今日,我将这份倾慕与思考记录在此日记之中。初次听闻安-225的名声, ... 机械之最04-06
-

一文图解 72 个机器学习基础知识点 作者王路情,澳门科技大学博士, 提供软件开发、数据分析和智能应用服务。微信:shushengya360,1. 机器学习概述1)什么是机器学习人工智能(Artificial intelligence)是研究、开发用于模拟、延伸和扩展人的智能的理 ... 机械之最04-05
-

在皇帝之最中,乾隆独揽了哪三项? 在中国历史的璀璨星空中,乾隆皇帝犹如一颗耀眼的明星,独占鳌头。他不仅是长寿的象征,更是执政时间的冠军,还是诗词创作的“诗歌机器”。想知道这位皇帝是如何在这三项“皇帝之最”中脱颖而出的吗?让我们一起揭开 ... 机械之最04-04
-
机械工程世界一流学科排名:16所进全球前30,上大北理南航闪耀! 机械被誉为工业之母,研究和解决机械设计、制造、机电工程以及自动化的各种理论和实际问题的应用科学。没有机械,工业发展就是空话,是一个国家综合实力的最强大保证。来源于软科官方网站软科排行榜发布了最新世界一 ... 机械之最04-04
相关文章
- 大罗谈生涯最凶残被铲:对方鞋钉长到像穿高跟鞋,走路像机械战警
- 燕山大学的王牌专业——机械工程,中等生的不二之选
- 尼康相机创造过哪些“世界之最”?——众通社影像
- 各类轴体,75~98键,哪种机械键盘更适合你?自用百元键盘推荐
- 哪个品牌机械手表最耐用
- 机械之美,齿轮运转,动力无限!
- 标题:《探秘世界“巨无霸机械”:工业奇迹的力量与震撼》
- 学机械,这9所大学重点考虑!
- 机械仪表最好看
- 机械魅力:解锁机械结构设计的艺术之美✨
- 钢铁丛林中的机械美学狂想曲
- 机械专业最具潜力的六个岗位,前景好,薪资高
- 为啥好多网友说乾隆就是一台冰冷的政治机器?网友回答道出真相
- 祖冲之:古代中国的数学巨匠与科学先驱
- “机械,最好找工作的专业之一”,山东二本,4个机械男,毕业8年
- 太重1300吨桥式起重机荣获2024年重型机械世界之最科技成果
- 又一项世界之最→太重集团1300t桥式起重机
- 又一殊荣 太重1300t桥式起重机荣获2024年重型机械世界之最科技成果
- 全省唯一!“洛阳制造”再添世界之最
- 经开快讯丨中国重型院项目荣获2024年重型机械世界之最科技成果







