关于弦理论和高维度空间的诠释,两个几何世界的镜像连接!
28年前,物理学家在试图弄清楚弦理论的一些细节的过程中,观察到了一种奇异的对应关系:从一种几何世界出现的数字与来自截然不同的几何世界中的极为不同的数字完全匹配。
对于物理学家而言,这种对应是相当有趣的。但对数学家来说,这简直荒谬。几十年来,数学家一直在独立研究这两个几何世界。这两者之间存在着密切的相关性似乎是非常不可能的,这好比是在说当一个宇航员在月球上跳跃时,某些隐藏链接会导致他的妹妹也在地球上跳跃。
David Morrison 是最早研究这些匹配数字的数学家之一,他说:“乍看之下这简直完全不可思议。”
近三十年后,怀疑早已让位于启示。这个首先由物理学家观察到的几何关系,是当代数学中最活跃的领域之一。该领域被称为镜像对称,指的是两个看起来很遥远的数学宇宙似乎以某种方式准确地反映彼此。自第一次观察到这种对应后——即一边的一组数字与另一边的一组数字完全相匹配——数学家发现了更多复杂的镜像关系的实例:宇航员和他的妹妹不仅一起跳跃,他们还会同时挥手和做梦。
最近,镜像对称的研究出现了新的变化。经过多年对更多同样潜在例子的发现,数学家们正在接近能解释为何会发生这种现象的真相。加州大学伯克利分校的数学家 Denis Auroux 说:“我们已经发现了陆地,并有望着陆。”
好几个数学家团队都在努力寻找对镜像对称的基本解释,并且离这一领域的中心猜测已越来越近。他们的工作就像是揭开一种几何形式的DNA,一种解释了两个截然不同的几何世界是如何可能表达相同特征的共享代码。
发现镜像
最终成为镜像对称领域的,是物理学家一开始寻找的额外维度。早在20世纪60年代末期,物理学家就试图用微小的振动弦来解释电子、光子、夸克等基本粒子的存在。到了20世纪80年代,物理学家明白了若要使“弦理论”奏效,那么弦必须存在于10维中——比我们可以观察到的4维时空多出了六个。他们提出,在这六个看不见的维度里发生的事情,决定了我们物理世界的可观测特性。
剑桥大学数学家 Mark Gross 说:“我们或许有这样一个无法直接看到或测量的微小空间,但是这个空间的某些几何形状可能会影响现实世界里的物理学。”
最终,他们提出了六个维度的潜在描述。在介绍它们之前,我们可以先思考一下空间具有几何形状意味着什么。
设想一下一个蜂巢和一栋摩天大楼,它们都是三维结构,但却有着非常不同的几何形状:它们的布局不同、外部曲率不同、内角也是不同的。同样,弦理论学家提出了完全不同的方式来想象缺失的六个维度。
一种方法出现在数学领域里的代数几何中:数学家通过画图来研究多项式方程,例如根据方程 x² + y² = 1 可画出一个圆。更复杂的方程可以形成更精细的几何空间。数学家探索了这些空间的性质,以便更好地理解原始方程。因为数学家经常使用复数,所以这些空间通常被称为复流形。
另一种类型的几何空间最初是通过思考真实的物理系统才得以构造的,比如行星的轨道。这种几何空间中的每个点的坐标值可以代表行星的位置和动量。如果把一个行星的所有可能位置与所有可能动量结合在一起,就能得到这个星球的“相位空间”——这是一个几何空间,在这个空间里的点为行星运动提供了完整的描述。这个空间有一个“辛(symplectic)”结构,能对支配行星运动的物理定律进行编码。
辛几何和复几何之间的不同就好比是蜂蜡与钢铁。它们制造的空间非常不同。复空间具有非常僵硬且精确的结构——想象一个圆,哪怕你只是稍稍地扭动它,它便不再是一个圆。它会变成一个完全不同的形状,不能用一个简单的多项式方程来描述。辛几何则更加灵活:一个圆和一个有点“缺陷”的圆对它来说几乎是一样的。
剑桥大学的研究员 Nick Sheridan 说:“代数几何是一个更加僵硬的世界,而辛几何则更灵活。两个如此不同的世界却在深层次上有着等同性,这就是令我们倍感意外的原因之一。”
在上个世纪80年代后期,弦理论学家提出了两种方法来描述缺失的六个维度:一个来源自于辛几何,另一个来自复几何。他们发现这两者之中的任一种空间都与他们试图解释的四维世界一致。这被称为对偶(duality):任何一个都可运作,并且我们无法用什么测试来将两者区分。
随后物理学家开始探索对偶可扩展的程度。当他们这样做时,却发现了这两种空间之间的联系,引起了数学家的注意。
1991年,Philip Candelas、Xenia de la Ossa、Paul Green 还有 Linda Parkes 四位物理学家组成了一个研究团队,对复空间、以及为了用来预测辛空间中的对应数而生成的数值进行计算。预测必须与可以在六维辛空间中绘制的不同类型的曲线的数量相关。数学家早就一直在努力试图计算这些曲线,他们怎样也想不到这些曲线的数量能与物理学家为了进行预测而使用的复空间计算能有任何关系。
起初结果非常牵强,数学家不知道该如何做。但是几个月后(1991年5月),在一个聚集了物理学家和数学家的匆忙召开的会议上,这种联系变得无可辩驳。Sheridan 说:“最终,数学家们致力于验证物理学家的预测,并意识到这两个世界之间的对应关系是数百年来未曾被数学家注意过镜像两侧的真实事物。”
镜像对偶的发现意味着,在短期内,研究这两种几何空间的数学家可以拥有两倍数量的工具:现在他们可以使用代数几何的技术来回答辛几何的问题,反之亦然。
最大的难题
与此同时,数学家和物理学家开始为镜像现象寻找一个共同的成因或潜在的几何解释。就像我们现在可以通过共有的遗传代码元素来解释不同生物之间的相似性一样,数学家试图通过将辛流形和复流形分解成一些共同的基本元素——环形纤维(torus fiber)——来解释镜像对称。
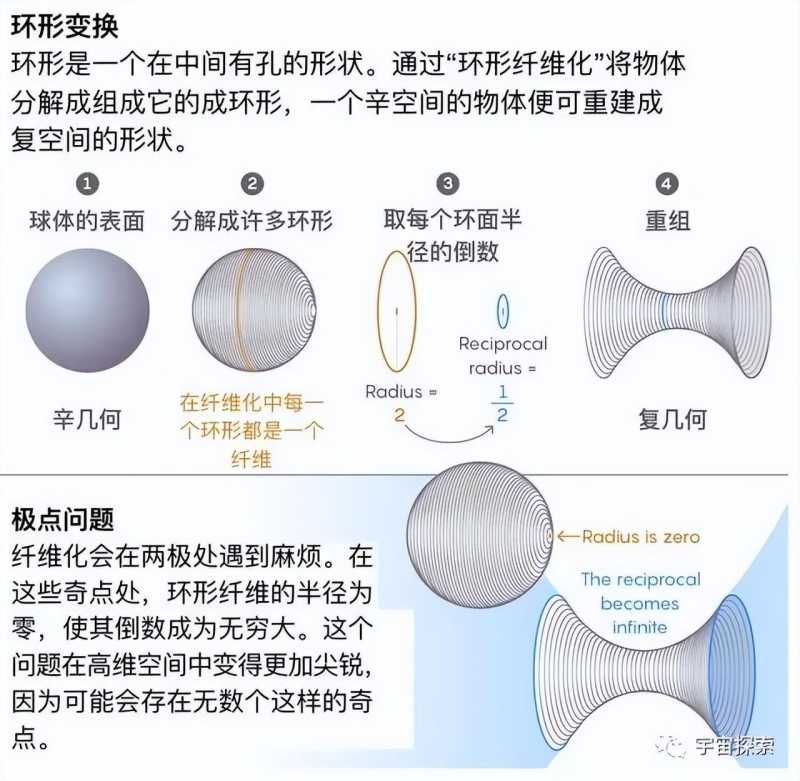
环形是一个在中间有孔的形状。一个普通的圆是一个一维环形,一个甜甜圈的表面是一个二维环形。一个环形可以具有任意数量的维度。只要以正确的方式将大量低维的环形粘合在一起,就能构建出更高维度的形状。
举个简单的例子,试想一下地球的表面。它是一个二维球面。但我们也可以把它看作是由许多一维圆圈(就像许多条纬线)粘在一起的。将所有的圆粘在一起是球的“环形纤维化”——由单个纤维一起编织成的更大整体。
○ 图片来源:Lucy Reading-Ikkanda/Quanta Magazine
环形纤维化的用处表现在几个方面。一是他们为数学家思考复杂的空间提供了一个简单的方法。就像可以构造一个二维球体的环形纤维一样,我们也可以构造出镜像对称的六维辛空间和复空间的环形纤维。这时空间的纤维不再是圆,而是三维环形。尽管我们不可能将六维辛流形可视化,但三维环形却几乎是触手可及的。Sheridan 说:“这已经是莫大的帮助。”
环形纤维化还有其他用处:它将一个镜像空间分解为一组可用于构建另一个空间的基础材料。换句话说,你不一定需要通过观察鸭子来了解狗,但是如果你将每只动物分解成原始的遗传密码,就可以从中寻找出相似之处,比如两种生物都有眼睛,这似乎就不足为奇了。
那么,如何将辛空间转换为复空间的镜像呢?一个简单的图景是,首先在辛空间上进行环形纤维化,这样就能得到很多环形。每一个环形都有一个半径。接下来,取每个环形半径的倒数(也就是说在辛空间中半径为4的环形,变成了镜像的复空间中半径为1/4的环形)。然后利用这些具有互为倒数的半径的新环形来构建新的空间。
1996年,Andrew Strominger、 Shing-Tung Yau(丘成桐)和 Eric Zaslow 提出了这种将任何辛空间转换成其镜像复空间的一般方法。以他们三位姓氏的首写字母命名的SYZ猜想说的就是,我们始终可以用一个环形纤维空间从镜的一侧移动(对应)到另一侧。它与 Maxim Kontsevich 在1994年提出的同调镜像对称猜想一起,试图对镜像对称现象进行解释。证明这两个猜想也成为了镜像对称领域中的基本问题。
SYZ猜想很难证明,因为在实践操作中,创建环形纤维然后取半径的倒数的过程并不容易实现。为了搞清楚为什么,我们回到地球表面的例子:在一开始,用圆来分解它似乎很容易做到,但在两极,圆的半径就为零了。而零的倒数是无穷大。因此如果半径为零,就遇到大麻烦了。
当尝试创建一个六维辛空间的环形纤维时,这一难点就会以更明显的方式出现。因为在六维辛空间,可能会有无穷多环形纤维的部分纤维被压缩成半径为零的点。数学家仍在试图弄清楚如何使用这种纤维。宾夕法尼亚大学的数学家 Tony Pantev 表示:“合理解释这样的环形纤维空间是一个巨大的难题。”
换句话说,SYZ猜想认为环形纤维化是辛空间和复空间之间的关键环节,但在很多情况下,数学家并不知道如何执行猜想中所描述的平移过程。
隐藏已久的连接
在过去的27年中,数学家发现了数亿个镜像对——某个辛流形与另一个复流形处于镜像关系——的例子。但在了解现象发生的原因时,数量并不那么重要。Gross 说:“我们有大量的例子,可能有4亿多个。所以说我们并不缺乏实例,但是仍有一些具体例子看起来并没有为整个故事为什么会这样运作起到启示作用。”
数学家希望找到一个通用的构造方法——一个通过给定任何辛流形,就能得到它的镜像的标准过程。现在数学家相信他们正在接近实现这样一个过程。Auroux说:“我们正在逐渐理解这种现象,试图尽可能多地证明它具有的一般性。”
数学家正在沿着几个相互关联的方向前进。经过几十年对镜像对称领域的研究,他们已非常接近理解该领域奏效的主要原因。法国高等科学研究所(IHES)的数学家 Kontsevich 是该领域的领导者,他说:“我认为这一目标能在合理的时间内完成,它很快就将得到证实了。”
一个活跃的研究领域创造了一个围绕SYZ猜想的最终结果。它试图将几何信息在没有完整的环形纤维化的情况下,从辛空间转移到复空间。2016年,Gross和汉堡大学的 Bernd Siebert 一同发布了一个为达到这一目的的通用方法。他们现在正在完成一个表明该方法适用于所有镜像空间的证明。Gross 说:“现在完整的证明已经全部写下来了,但仍需要梳理。”他和 Siebert 希望能在今年年底之前完成。
另一个主要的研究线试图证明,假设你有一个为你提供镜像空间的环形纤维,那么镜像对称的所有最重要的关系就会从那里消失。该研究计划被称为“Floer理论”,并正由哥伦比亚大学的数学家 Mohammed Abouzaid 发展。2017年3月,Abouzaid 发表了一篇论文,证明这种逻辑链适用于某些类型的镜像对,但还不是全部。
最后,还有一些研究回到了这个领域开始的地方。Sheridan、Sheel Ganatra 和 Timothy Perutz 三位数学家正在基于 Kontsevich 于20世纪90年代提出的开创性想法——同调镜像对称猜想——上继续前行。
累积起来,这三项举措将有可能为镜像现象画上完满的句点。Auroux 说:“我想我们已经到了所有重要的‘为什么’问题都接近被理解的程度。”
大家都在看
-

乌克兰这张牌已打废,下一个上桌的会是谁?美国已下达最后通牒 “牌桌”风云再起:乌克兰“出局”,伊朗成新“焦点”,美俄博弈升级2025年3月21日,国际政治“牌桌”上风云再起。乌克兰这张曾经的“热门牌”似乎已经打废,而新的“焦点牌”正悄然登场——那就是伊朗。美国,这个 ... 宇宙探索03-25
-

地球深处发现5.6万亿吨氢气,够人类用一万年,石油会被淘汰? 氢能源,作为未来的环保明星,究竟有多大的潜力?想象一下,如果我们能大规模利用氢气,地球会变成什么样子?提到,科学家在地球深处发现了惊人的氢气储量,这意味着我们可能有能力解决能源危机,但这背后又隐藏着哪 ... 宇宙探索03-24
-

2025科技革命:AI与太空探索双翼齐飞,如何重塑人类宇宙认知? ——从深空探测到星际基建,一场颠覆性变革正在上演2025年,人工智能与太空探索的深度融合正以前所未有的速度改写人类文明的边界。从AI驱动的航天器自主决策到月球资源的智能化开发,从量子计算赋能深空通信到“卫星 ... 宇宙探索03-23
-

星星为何悬空不落?宇宙中颠覆常识的引力真相 深夜仰望星空时,你是否想过这样一个问题:那些闪烁的星球为何能稳稳悬在空中?人类对宇宙运行规律的探索,正在解开这个困扰无数人的谜题。宇宙中的星球苹果落地的启示:引力如何塑造宇宙1666年秋天,剑桥大学的一颗 ... 宇宙探索03-20
-
你知道什么是元宇宙吗? ---元宇宙(Metaverse)是由数字技术构建的沉浸式虚拟世界**,融合了虚拟现实(VR)、增强现实(AR)、区块链、人工智能(AI)等技术,允许用户通过数字身份在其中进行社交、交易、创作和体验。以下是元宇宙的深度解 ... 宇宙探索03-20
-

和斑马鱼一起打开宇宙探索日记 曾有人预言:“未来人类将在太空建造生物实验室!”这个梦想现在变成什么样了?从不敢想象太空里有生命存活,到现在斑马鱼在太空安家,在太空失重的环境下,科学家们正在通过它们,为地球上骨质疏松的患者寻找新的治 ... 宇宙探索03-20
-

天上下铁雨,云层飘金属,科学家发现 "地狱行星"Wasp121b 在宇宙之中,科学家们却有了惊人发现 —— 一颗堪称整个银河系中最为恐怖的系外行星。它名为 Wasp 121b,亦被称作泰勒斯。那么,这颗行星的环境究竟恶劣到何种地步?答案就是:这里下的雨竟是液态铁。这颗与木星体积 ... 宇宙探索03-16
-

俄乌停战进入倒计时,美议程转向伊朗,“4.5雄”格局浮出水面 俄乌停战倒计时?美伊风云再起,全球格局惊现“4.5雄”!2025年3月9日,国际风云突变,俄乌战场的硝烟似乎还未散去,美国却已悄然将目光投向了另一个热点——伊朗。特朗普的一封信,如同投入平静湖面的巨石,激起了 ... 宇宙探索03-16
-

重磅!中国航天火星“挖土”时间表敲定,探索宇宙再进一步 就在最近,中国探月工程总设计师、中国工程院院士吴伟仁在接受访谈时带来了一个令全球瞩目的消息:中国航天去火星取土壤有了明确的时间表,将在几年内实施!这一消息瞬间点燃了人们对宇宙探索的热情,让大家对中国航 ... 宇宙探索03-12
-

宇宙的终极谢幕,它可能消亡的四种剧本 从138亿年前大爆炸的绚烂开场,到未来数万亿年的漫长沉寂,我们的宇宙正以每秒7万公里的速度奔向某个未知终点——这个真相就藏在每颗恒星的余光里。第一章 热寂说(主流假说)当我们把哈勃望远镜最新观测数据导入模 ... 宇宙探索03-12
相关文章
- 宇宙的终极谢幕,它可能消亡的四种剧本
- 宇宙的奥秘:探索我们的尚未完全理解的现象
- 宇宙的奥秘:探索未知的世界
- 2025宇宙探索大爆发!人类正在揭开哪些宇宙秘密?
- 最终的奥秘:宇宙的形状是什么?天文学家提出新的探索方法
- 为什么年轻人越来越关注宇宙探索?太空旅行真的可能吗?
- 宇宙之谜:探索宇宙奥秘与人类未来的星际之旅
- 美国的确赶不上!中国火星采样返回有望世界第一,天问二号是先锋
- 《了解宇宙:探索无尽的奥秘》
- 国际空间站还能撑多久?它的谢幕,竟是宇宙探索的“火种”?
- 2025年宇宙探索大爆发!月全食、火星冲日等,这些天文奇观别错过
- 火星适合人类居住吗 了解火星上面的生存环境
- 世界之最地理知识 有哪些是世界之最地理知识
- 月球背面到底有什么秘密 揭秘月球背面的隐藏
- 外星人到过地球的证据 讲解在地球外星人留下的痕迹
- 地球给人类的警告有哪些 地球敲响警钟的表现
- 2025外星人入侵地球是真的吗 分析外星人是否真实存在
- 没了地球人类该去哪里生存 人类可以离开地球吗
- 2025最新UFO 2025年最新UFO事件情况
- 地球上最年轻的高原 被成为世界第三极的是哪一个
热门阅读
-
 1
预言2030年太阳将休眠,恐怖的千年极寒将来临 07-11
1
预言2030年太阳将休眠,恐怖的千年极寒将来临 07-11 -
 2
中国十大元帅之死,多高寿而善终(林彪叛逃而死) 07-11
2
中国十大元帅之死,多高寿而善终(林彪叛逃而死) 07-11 -
 3
因果报应真实事例,做尽坏事必遭天谴 07-11
3
因果报应真实事例,做尽坏事必遭天谴 07-11 -
 4
全球人口减少可能带来的六大教训和好处 07-18
4
全球人口减少可能带来的六大教训和好处 07-18 -
 5
5
-
 6
6
-
 7
离太阳最近的十大恒星排名,宇宙最大十大星球 04-12
7
离太阳最近的十大恒星排名,宇宙最大十大星球 04-12 -
 8
8