世界上最快的10台超高速电梯!1分钟就能冲上1000米高空!
文、编辑\大壮
高速电梯与导轨非线性耦合系统是现代建筑中常见的一种交通工具,它采用先进的技术和设计理念,能够提供快速、安全、舒适的垂直交通服务。该系统利用导轨作为电梯运行的基础,通过非线性耦合来实现电梯的高速运行和精确控制。
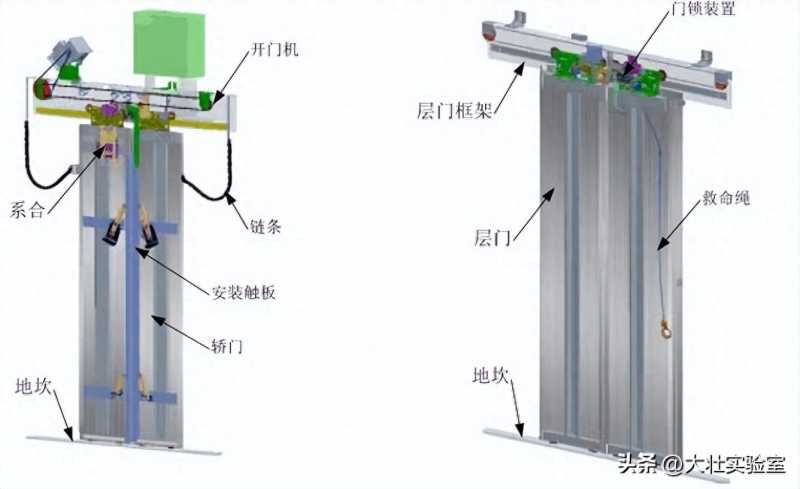
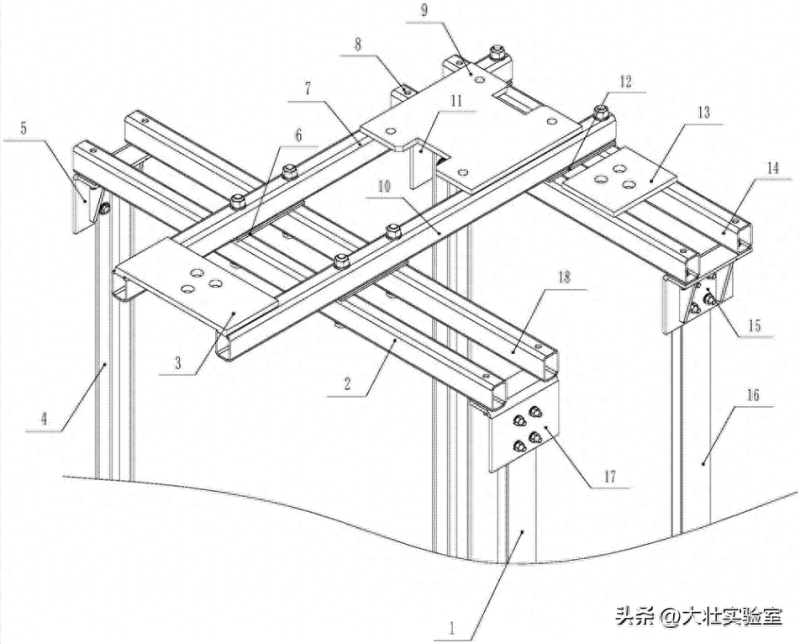
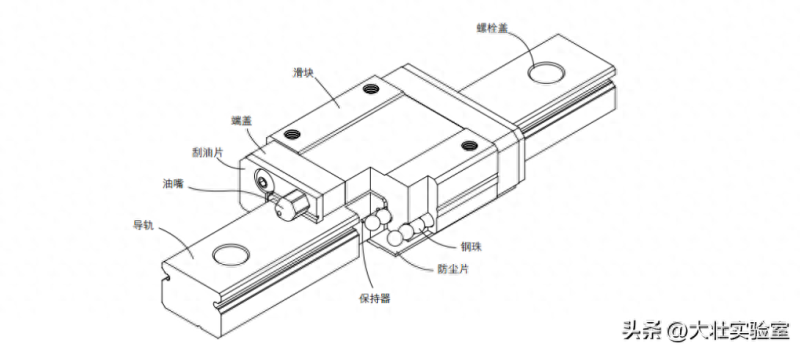
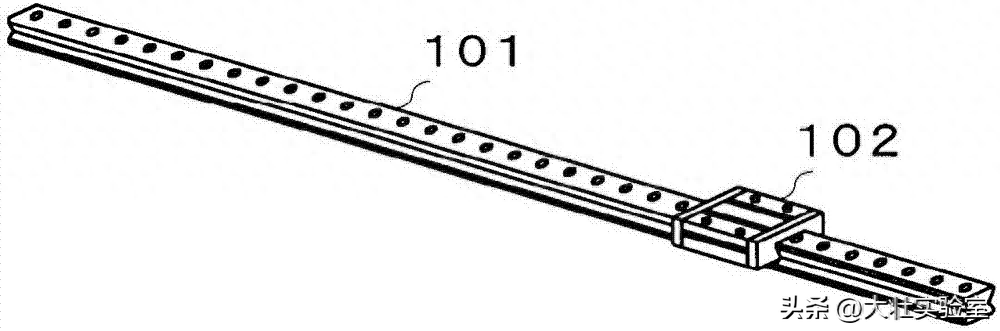
高速电梯与导轨非线性耦合系统的关键在于电梯和导轨之间的紧密配合。导轨作为承载电梯运动的基础,必须具有高强度、高稳定性和耐久性。同时,导轨的几何形状和表面光滑度也对电梯的运行速度和平稳性产生重要影响。因此,在设计和制造导轨时,需要严格按照相关标准进行,并采用先进的材料和加工技术,以确保电梯和导轨的良好耦合。
高速电梯与导轨非线性耦合系统中的非线性特性是实现高速运行和精确控制的关键因素之一。由于电梯在运行过程中存在各种复杂的力学规律和动力学现象,如弹性变形、空气阻力、惯性力等,传统的线性控制方法往往无法满足要求。
因此,非线性控制方法应用于高速电梯系统中,可以更好地适应复杂运行环境和实现精确控制。
另外,高速电梯与导轨非线性耦合系统还需要具备高速、高效的运行能力。为了提高电梯的运行速度和加速度,必须采用先进的电机和传动装置。同时,为了保证乘客的安全和舒适,系统还需要配备先进的安全控制和故障检测装置,以及人性化的乘坐体验设计。

高速电梯与导轨非线性耦合系统是一种先进的垂直交通工具,它通过导轨作为基础实现电梯的高速运行和精确控制。该系统利用非线性耦合和先进的控制方法,能够适应复杂的运行环境,并提供安全、快速、舒适的乘坐体验。
一、高速电梯与导轨非线性耦合系统的动力学建模与控制
高速电梯与导轨非线性耦合系统在现代建筑中扮演着重要的角色。为了满足不断增长的交通需求,提供快速、安全、舒适的垂直交通服务,对该系统进行精确控制至关重要。然而,由于电梯与导轨之间存在复杂的非线性耦合效应,传统线性控制方法往往无法满足要求。因此,动力学建模和控制成为了解决该系统问题的关键。

导轨必须具备高强度、高稳定性和耐久性,以支撑电梯的运动。电梯与导轨之间存在复杂的非线性耦合效应,如弹性变形、空气阻力等。系统运行过程中存在多种动力学现象,如振动、惯性力等。
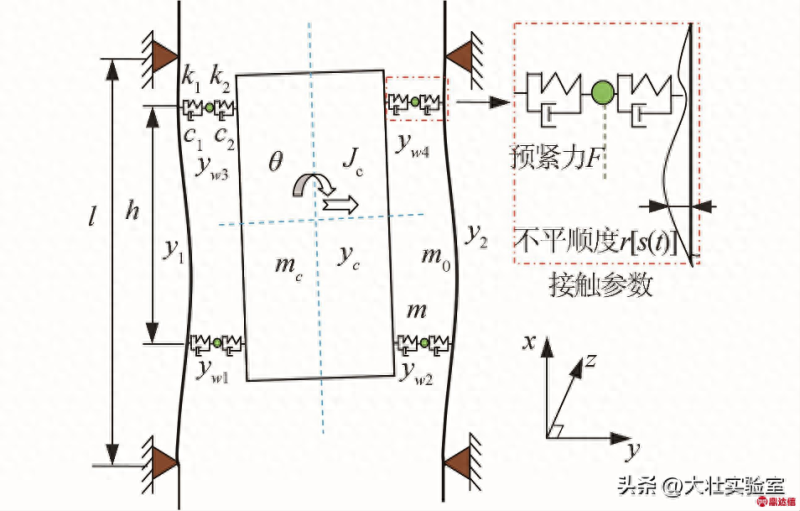
为了更好地理解高速电梯与导轨非线性耦合系统的动力学行为,我们需要建立相应的数学模型。在建模过程中,考虑以下因素:电梯的质量、摩擦力、空气阻力等影响因素。导轨的几何形状、弹性变形等特性。电梯与导轨之间的摩擦力和耦合效应。

在设计过程中,考虑以下因素:电梯运行速度和加速度的要求。系统的稳定性和抗干扰能力。乘客的安全和舒适性。基于以上考虑,我们可以采用先进的非线性控制方法,如模糊控制、自适应控制等,来实现对高速电梯与导轨非线性耦合系统的控制。
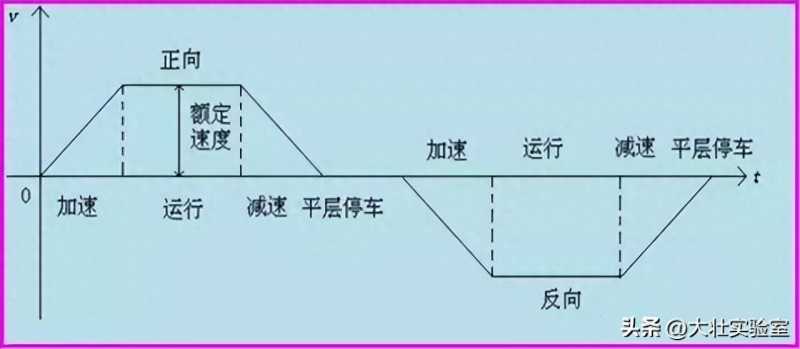
通过仿真实验,我们评估了所提出的动力学建模和控制方法的性能。仿真结果表明,在所设计的控制策略下,高速电梯与导轨非线性耦合系统可以实现高速运行、准确停靠,并具备良好的稳定性和乘坐舒适度。

二、智能算法的高速电梯与导轨非线性耦合系统优化设计
高速电梯与导轨非线性耦合系统是现代建筑中常见的垂直交通工具。为了提供快速、安全、舒适的垂直交通服务,对该系统进行优化设计具有重要意义。然而,由于系统的非线性耦合效应和复杂性,传统设计方法往往无法充分发挥系统的性能。因此,引入智能算法用于优化设计成为一种有效的解决方案。
系统具有多变量、非线性和耦合效应,难以建立准确的数学模型。系统参数的选择对系统的性能影响显著,但传统设计方法无法全面考虑参数优化问题。系统对振动、噪声等环境干扰敏感,需要提高系统的稳定性和鲁棒性。
为了解决现有设计方法存在的问题,引入智能算法,利用其优化能力对高速电梯与导轨非线性耦合系统进行设计优化。常用的智能算法包括遗传算法、粒子群优化算法、人工神经网络等。这些算法具有全局搜索和非线性优化的特点,适用于复杂的系统设计问题。
定义设计变量和目标函数。设计变量包括系统的参数和控制策略,目标函数包括系统性能的指标,如速度、精度、能耗等。初始化种群。通过随机生成初始解集合来初始化种群。评估适应度。根据目标函数对每个个体进行适应度评估。
选择操作。采用选择操作来确定下一代种群,以保留适应度较高的个体。交叉和变异。采用交叉和变异操作来产生新的解,并更新当前种群。通过与传统设计方法进行对比,评估所提出方法的有效性和性能优势,基于智能算法的优化设计方法能够显著改进高速电梯与导轨非线性耦合系统的性能,提高系统的速度、精确度和鲁棒性。
三、考虑电磁力特性的高速电梯与导轨非线性耦合系统分析与控制
高速电梯与导轨非线性耦合系统是现代建筑中常见的垂直交通工具。由于系统的非线性耦合效应和复杂性,传统设计方法往往无法充分发挥系统的性能。同时,电磁力作为系统中的重要因素之一,对系统的运行和控制具有重要影响。因此,考虑电磁力特性对高速电梯与导轨非线性耦合系统进行分析与控制具有重要意义。
电磁力是高速电梯与导轨非线性耦合系统中的重要因素之一。它由电动机驱动产生,并在导轨上产生作用力。电磁力的存在会对系统的运行和控制产生影响。为了更好地理解电磁力的特性和影响,我们建立了相应的数学模型。该模型综合考虑了电磁力、导轨完整性以及其他系统参数,以描述系统的动态行为和稳定性。
基于电磁力特性的分析,提出了一种电磁力补偿控制策略。该策略通过实时测量和计算电磁力,并将其引入系统反馈控制中,以补偿电磁力对系统的影响。具体而言,控制器根据电磁力误差信号调整系统的控制参数,以实现系统性能的优化和稳定性的提高。仿真实验结果表明,该控制策略能够有效地抑制电磁力的影响,提高系统的运行效果和稳定性。
通过仿真实验对所提出的电磁力补偿控制策略进行验证。与传统控制方法进行对比,评估该策略在提高系统性能和稳定性方面的优势。实验结果表明,考虑电磁力特性的控制策略能够显著改善高速电梯与导轨非线性耦合系统的性能,提高系统的运行效率和稳定性。
考虑了电磁力特性并进行了高速电梯与导轨非线性耦合系统的分析与控制。通过建立数学模型和提出电磁力补偿控制策略,能够更好地理解电磁力的特性和影响,并优化系统的性能和稳定性。

四、高速电梯与导轨非线性耦合系统的振动与噪声控制
高速电梯与导轨非线性耦合系统在现代建筑中起着重要的角色,但其振动和噪声问题对于系统的性能和乘客的舒适度具有挑战性。
介绍系统的特点和问题,详细分析振动和噪声的来源和影响因素,并建立了相应的数学模型,提出了一种综合控制策略,通过仿真实验验证了该方法的有效性和性能优势。高速电梯与导轨非线性耦合系统是现代建筑中常见的垂直交通工具,但其振动和噪声问题一直困扰着系统的性能和乘客的舒适度。

由于系统的复杂性和非线性耦合效应,传统设计方法往往难以解决这些问题。因此,对高速电梯与导轨非线性耦合系统的振动和噪声进行分析与控制具有重要意义。高速电梯与导轨非线性耦合系统在运行过程中会产生振动和噪声,主要表现为以下特点和问题:
振动和噪声对系统的性能和乘客的舒适度产生负面影响。不同组件之间的非线性耦合效应导致系统振动和噪声的复杂性。振动和噪声的来源包括电动机、导轨、悬挂装置等多个部分,需要进行全面分析和控制。振动与噪声的来源和影响因素分析:
为了更好地理解振动和噪声的特点和影响因素,对其来源进行了详细分析,包括:电动机震动:电动机的不平衡、轴向力和谐波引起的振动。导轨震动:导轨的几何非理想性、装配松动和共振引起的振动。
悬挂装置震动:绳索、弹簧和减震器等悬挂装置的振动传递和传导。影响振动和噪声的因素还包括电梯运行速度、载重情况、楼层高度等。为了全面分析和控制振动和噪声问题,我们建立了相应的数学模型。
振动与噪声控制策略 基于对振动和噪声来源及其影响因素的分析,提出了一种综合控制策略。该策略包括以下关键步骤:优化设计:通过改进电机、导轨和悬挂装置的设计,减小振动和噪声的源头。主动控制:引入主动控制技术,如振动传感器和反馈控制器,实时监测和调整系统的运行状态,抑制振动和噪声的产生。
被动控制:使用吸音材料和隔音设施来吸收和隔离振动和噪声,降低其传播和影响。综合的控制策略通过优化设计、主动控制和被动控制相结合,有效地控制了高速电梯与导轨非线性耦合系统的振动和噪声问题。

通过仿真实验验证了所提出的综合控制策略在振动和噪声控制方面的有效性。与传统控制方法进行比较,评估了该策略在改善系统性能和乘客舒适度方面的优势。实验结果表明,综合控制策略能够显著降低系统的振动水平和噪声强度,提高系统的运行效果和乘客的舒适度。

大家都在看
-

“全球最快高铁”如何炼成 本报记者 李迅典正在试验中的CR450动车组 (铁科院铁道科技影视中心摄影)跑出单列时速453公里、相对交会时速896公里最新纪录的CR450动车组,正在进行运营前的“毕业考试”——60万公里运用考核。这款被视为“十四五 ... 世界最快12-06
-
“全球最快高铁”要来了! 被称作“全球最快高铁”的CR450动车组正在沪渝蓉高铁开展运用考核2021年,“十四五”规划102项重大项目之一的CR450科技创新工程启动。去年年底,CR450动车组样车发布,目前已完成在不同速度、不同场景中的多项试验。 ... 世界最快10-22
-
“全球最快高铁”,有新消息! 被称作“全球最快高铁”的CR450动车组样车去年底公布后,目前正在不同速度、不同场景中进行多项试验。试验期间,CR450动车组跑出了动车组单列时速453公里、相对交会时速896公里的最新纪录。目前,CR450动车组正在沪 ... 世界最快10-22
-
全球最快动车组,正在“刷里程” 人享其行、物畅其流是我国交通运输业发展的目标。“十四五”期间,我国加速织就交通“经纬网”,已拥有世界最大的高速铁路网、高速公路网和邮政快递网,综合立体交通网总里程已超过600万公里。目前,我国国家综合立 ... 世界最快10-21
-

“全球最快高铁”,有新消息 被称作“全球最快高铁”的CR450动车组样车去年底公布后,目前正在不同速度、不同场景中进行多项试验。试验期间,CR450动车组跑出了动车组单列时速453公里、相对交会时速896公里的最新纪录。目前,CR450动车组正在沪 ... 世界最快10-21
-
时速453公里!“全球最快高铁”正在刷里程,明年全面测试!上海到北京2.5小时? 据央视新闻最新消息:被称作“全球最快高铁”的CR450动车组正在沪渝蓉高铁开展运用考核2021年,“十四五”规划102项重大项目之一的CR450科技创新工程启动,去年年底,CR450动车组样车发布,目前已完成在不同速度、不 ... 世界最快10-21
-
全球最快高铁,有重要进展! 被称作“全球最快高铁”的CR450动车组,已完成在不同速度、不同场景中的多项试验,试验期间,更是跑出了单列时速453公里、相对交会时速896公里的最新纪录。目前,CR450动车组正在沪渝蓉高铁开展运用考核,什么是运用 ... 世界最快10-21
-

“全球最快高铁”,要来了! 被称作“全球最快高铁”的CR450动车组样车去年底公布后,目前正在不同速度、不同场景中进行多项试验。试验期间,CR450动车组跑出了动车组单列时速453公里、相对交会时速896公里的最新纪录。目前,CR450动车组正在沪 ... 世界最快10-21
-

世界最快人力自行车,人躺在里面就能骑,时速高达144公里! 注意看,这难道是一颗"蛋"冲过去了吗?此时它正在公路上快速的飞驰着,镜头拉近一看才知道,实则它是世界上跑的最快的人力自行车。令人感到惊讶的是,它的时速竟然超过了144公里,简直把家用汽车远远的甩在 ... 世界最快10-14
-

关键核心技术全面自主化!我国首列,全球最快! 科技日报记者 宋迎迎9月18日,具有完全自主知识产权的我国首列中国标准智能市域列车在青岛亮相,标志着我国在市域轨道交通装备领域取得重要新突破,系列化中国标准智能市域列车实现示范应用。它的问世,引领我国市域 ... 世界最快09-20
相关文章
- 世界最快人力自行车,人躺在里面就能骑,时速高达144公里!
- 关键核心技术全面自主化!我国首列,全球最快!
- 全球最快!时速400公里高铁列车来了
- 全球最快列车亮相“高铁创新之旅”
- 全球最快!在武汉!
- 全球最快、跑出全新试验速度 中国高铁再次冲上热搜
- 再出手!全球最快高铁成功试跑,北京到上海仅需2.5小时?
- 特稿丨时速400公里!全球最快,惊艳亮相!
- 时速400公里运营!“世界最快高铁”将在成渝间开跑
- 时速400公里!全球最快,惊艳亮相!
- 全球跑得最快的高铁,内部长啥样?一探究竟→
- 亮个相吧,全球跑得最快的高铁!
- 时速400公里!全球最快高铁来了
- 时速650公里!全球最快!
- 全球最快!CR450动车组样车在北京发布
- 10米/秒!全球最快的机器狗正式亮相
- 世界最快中低速磁浮开工建设
- 全球公认最快的燃脂运动,每天20分钟,一周暴瘦一圈!
- 世界上“倒退”最快的国家:从发达国家到一贫如洗,只用5年时间
- 全球最快致死记录之一,79年男孩被太攀蛇咬一口,10分钟人就
热门阅读
-
 1
1
-
 2
2
-
 3
3
-
 4
世界上最快的手指,一秒钟敲击琴键13次 10-12
4
世界上最快的手指,一秒钟敲击琴键13次 10-12 -
 5
世界上速度最快的火箭车,每小时达到1600公里 04-26
5
世界上速度最快的火箭车,每小时达到1600公里 04-26 -
 6
6
-
 7
世界上飞行最快的鸟,灵活的军舰鸟 04-26
7
世界上飞行最快的鸟,灵活的军舰鸟 04-26 -
 8
8